第1章 绪论
波束形成[1-5]声源识别技术利用一组传声器构成的阵列测量声压信号,基于特定方法后处理测得的声压信号来获取被测对象表面的声学成像图,通过匹配光学照片等方式来确定声源,又名“声学照相机”[6],具有测量速度快、因适宜中远距离测量而易于布置等优势,在噪声源识别、目标探测、故障诊断等领域被广泛应用,自1974年由Billingsley和Kinns[7]提出至今一直备受关注。
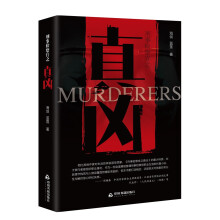
传声器阵列的结构形式决定波束形成声源识别的空间范围和应用场景。平面和球面是*常用的传声器阵列结构形式。平面传声器阵列的所有传声器共平面,几何形状有矩形网格形、圆环形、螺旋形、Fibonacci形、扇形轮形等;球面传声器阵列的所有传声器共球面,几何形状有开口球和刚性球。全球著名声振测试仪器供应商Brüel & Kj?r(必凯)公司、西门子、GFai公司等均提供平面传声器阵列和球面传声器阵列定制服务。平面传声器阵列适宜识别阵列前方局部区域内声源,典型应用场景包括发动机噪声源识别[8-11]、道路及轨道车辆通过噪声源识别[12-16]等。凭借旋转对称性好和声场记录全面,球面传声器阵列能360°全景识别声源,适宜在舱室等封闭环境内使用,典型应用场景包括汽车及高速列车车内噪声源识别[17-20]等。图1.1呈现了五种典型传声器阵列和四种典型应用场景。本书同时涵盖平面传声器阵列和球面传声器阵列。
图1.1 传声器阵列及应用场景照片
传声器阵列测量声压信号的后处理方法决定波束形成声源识别的性能。延迟求和(delay and sum,DAS)[21-24]和球谐函数波束形成(spherical harmonics beamforming,SHB)[25-30]是常用的传统方法。平面传声器阵列采用DAS;球面传声器阵列理论上既可采用DAS又可采用SHB,实际上主要采用SHB(低频表现更佳)。两种方法均离散目标声源区域形成一组聚焦网格点,聚焦各网格点时,DAS根据聚焦点位置或方向对各传声器测量的声压信号进行“相位对齐”和“求和运算”,SHB根据聚焦点位置或方向对传声器测量声压信号的各阶次球傅里叶变换系数进行“模态强度及球谐函数缩放”和“求和运算”,基于“一组复数加和的模在各复数同相位时*大”的原理和球谐函数的正交性[31],二者均能在声源位置或方向输出极大值。这些极大值虽能指示声源,但与非声源位置或方向处的输出值差异不显著,*终导致围绕声源位置或方向形成具有一定宽度的“主瓣”且在其他位置或方向形成高水平的“旁瓣”,主瓣宽度影响空间分辨能力,旁瓣形成寄生虚假声源,使结果分析承受不确定性,故DAS和SHB均可看作低性能方法。突破DAS和SHB的性能局限、发展高性能方法对提高声源识别精度和完善声源识别功能具有重要意义。自波束形成技术诞生至今,对高性能声源识别方法的探索从未间断且方兴未艾,包括本书作者在内的大批国内外学者都致力于该主题的研究并取得丰硕成果。本书研究同时关注反卷积波束形成、函数型波束形成和压缩波束形成三类具有旺盛生命力的高性能方法。
1.1 反卷积波束形成研究现状
反卷积波束形成本质上是求解式(1.1)所示线性方程组的逆问题:
(1.1)
式中,向量 和矩阵 已知,向量 未知。求解该线性方程组可从 中剔除 的影响,重构 。
如图1.2所示,已有求解算法可大致分为五类。前四类中, 由传统波束形成方法在各聚焦点处的输出的自谱构成, 由各聚焦点处的声源强度的自谱构成, 为点传播函数(point spread function,PSF)矩阵。PSF被定义为传统波束形成方法对单位强度单极子点声源的响应,传声器离散采样等因素使PSF不为理想 函数是传统方法承受宽主瓣和高旁瓣缺陷的根本原因。
**类算法在每个聚焦点处假设一个声源,计算各声源到各聚焦点的PSF构建完整的 后迭代求解式(1.1)。根据迭代过程中对 施加的约束,**类算法又可分为两小类:**小类只施加元素非负约束,已有算法包括采用高斯-塞德尔迭代方案的反卷积声源成像(deconvolution approach for the mapping of acoustic sources,DAMAS)、采用梯度投影法的非负*小二乘(non-negative least-squares,NNLS)和快速迭代收缩阈值算法(fast iterative shrikage-thresholding algorithm,FISTA)、采用概率统计法的Richardson-Lucy (RL)和采用单纯形法的线性规划(linear programming,LP);第二小类既施加元素非负约束又施加稀疏约束,已有算法包括稀疏约束DAMAS(sparsity constrained DAMAS,SC-DAMAS)、稀疏约束稳健DAMAS(sparsity constrained robust DAMAS,SC-RDAMAS)、基于弹性网正则化采用 和 范数的DAMAS(L1-L2-DAMAS)、采用 范数的DAMAS(L1/2- DAMAS)、正交匹配追踪DAMAS(orthogonal matching pursuit DAMAS,OMP-DAMAS)及改进版本、光滑FISTA(smoothing FISTA,SFISTA)、全变差范数约束反卷积(total variation norm constrained deconvolution,TVNCD)和分裂增广拉格朗日收缩算法(split augmented lagrangian shrinkage algorithm,SALSA)。增加稀疏约束可加快收敛速度进而带来更清晰直观的成像图,但以引入参数(如声源数目、规则化参数、光滑参数等)的恰当选择为前提。
图1.2 反卷积波束形成的求解算法分类
第二类算法仅计算构建 的部分列,迭代求解式(1.1)的思路为:用 的*大值指示一个声源;计算该声源到各聚焦点的PSF,即 中的一列,用其与该声源的强度的乘积表示该声源对 的贡献,从 中移除该贡献得新 ;重复前两步直至迭代终止,根据每次迭代确定的声源可得 。已有算法包括应用于频域的清除法(CLEAN)和其在时域下的变体CLEANT。
第三类算法假设PSF空间转移不变(只取决于聚焦点与声源间的相对位置或方向,而与具体位置或方向无关),仅计算中心聚焦点处声源到各聚焦点的PSF,再结合边界条件便可构建完整的 ,迭代求解式(1.1)时,诸如 等形式的矩阵运算还可转化为快速傅里叶变换(fast Fourier transform,FFT)进行求解。已有算法包括DAMAS2、FFT-NNLS、FFT-FISTA和FFT-RL,DAMAS2采用雅可比迭代方案,FFT-NNLS、FFT-FISTA和FFT-RL分别为NNLS、FISTA和RL的变体。
第四类算法求解式(1.1)的迭代思路与第二类算法类同,不同之处在于第二步:第四类算法用相干系数与传统波束形成方法的输出的乘积表示声源对 的贡献。因此, 完全无须被计算构建,取而代之的是计算传统波束形成方法在各聚焦点处的输出与*大输出间的相干系数。已有算法包括应用于频域的基于源相干性的清除法(CLEAN based on source coherence,CLEAN-SC)、高分辨率CLEAN-SC(High-Resolution CLEAN-SC,HR-CLEAN- SC)、增强型HR-CLEAN-SC(Enhanced HR-CLEAN-SC,EHR-CLEAN-SC)及CLEAN-SC在时域下的变体TIDY。
第五类算法中, 由传统波束形成方法在各聚焦点处的输出的互谱构成, 由各聚焦点处的声源强度的互谱构成, 为传递函数矩阵。已有算法命名为DAMAS-C,其计算构建出完整的 后通过施加约束和采用高斯-塞德尔迭代方案求解式(1.1)。记 为实数集, 为复数集, 为聚焦点总数, 为迭代次数,根据上述分析,前四类算法中, 、 且 ,第五类算法中, 、 且 ,**类算法需计算 个PSF,第二类算法需计算 个PSF,第三类算法仅需计算 个PSF,第四类算法不计算PSF但需计算 个相干系数,第五类算法不计算PSF但需计算 个传递函数,故可认为上述分类的依据是需要计算的PSF的数目。
实际应用中,式(1.1)中的“=”不绝对成立, 和 间的差异越小,重构的 越准确。若不考虑测量噪声干扰,**类、第二类和第四类算法中,当且仅当声源互不相干且采用足够多数据快拍来计算传声器测量声压信号的互谱矩阵时, 才成立;第三类算法中,使 成立不仅需要**类、第二类和第四类算法对应的条件,而且需要PSF空间转移不变;第五类算法无条件限制。这意味着**至四类算法*适宜应用于声源互不相干且数据快拍充足的工况,声源间存在相干性及数据快拍缺乏都会降低这些算法的性能,真实PSF的空间转移变化还会进一步降低第三类算法的性能;第五类算法则完美适用于任意相干程度声源和任意数据快拍数目,然而,由于涉及超大维度矩阵运算,第五类算法耗时极其严重,这极大地限制了其在实际工程中的推广应用。接下来,1.1.1节和1.1.2节将分别详细综述上述反卷积算法在平面和球面传声器阵列框架下的研究现状。
1.1.1 平面传声器阵列
平面传声器阵列框架下,图1.2中涉及算法均已被建立。DAMAS和DAMAS-C均由美国宇航局的Brooks等[32-34]于2004~2006年提出,DAMAS2由美国OptiNav公司的Dougherty[35]于2005年提出。NNLS[36]和RL[37,38]由德国宇航中心的Ehrenfried和Koop[39]于2007年引入到传声器阵列声源识别领域并给出相应变体FFT-NNLS和FFT-RL。CLEAN*早出现在天文学领域[40,41],由荷兰国家航天试验室的Sijtsma[42]于2007年引入到传声器阵列声源识别领域并同时提出CLEAN-SC;CLEAN-SC在时域下的变体TIDY由Dougherty和Podboy[43]于2009年提出;CLEAN在时域下的变体CLEANT由Cousson和Leclere[44]于2019年提出;2016~2019年,包括Sijtsma在内的多位学者[45-48]还相继提出CLEAN-SC的性能增强版本HR-CLEAN-SC和EHR-CLEAN-SC;2018年,重庆大学的褚志刚等[49]重新推导HR-CLEAN-SC的理论公式并给出详细直观的实施步骤,论文作者参与该工作并作出主要贡献。SC-DAMAS由美国佛罗里达大学的Yardibi等[50]于2007年提出,基于此,法国高等电力学院的Chu等[51]于2014年提出SC-RDAMAS,北京航空航天大学的Li等[52]于2014年提出L1-L2-DAMAS,清华大学的Bai和Li[53]于2019年提出L1/2-DAMAS。LP由Dougherty等[54]于2013年提出。FISTA*早出现在图像处理领域[55],由丹麦科技大学的Lylloff等[56]于2015年引入到传声器阵列声源识别领域并给出相应变体FFT-FISTA,基于此,重庆大学的Shen等[57]于2020年提出SFISTA。OMP-DAMAS由加拿大舍布鲁克大学的Padois和Berry[58]于2014年提出,其改进版本由挪威奥斯陆大学的Bergh[59]于2018年提出。TVNCD和SALSA由褚志刚等[60,61]分别于2018年和2020年提出。
国内外学者亦致力于上述算法的性能改进研究。**类和第五类算法的*主要问题是耗时严重,尤其是第五类。